Pluto Gabbia
Pluto Gabbia


Sei stagioni di test approfonditi e quasi mille ore di intense operazioni subacquee profonde hanno dimostrato che il PLUTO PALLA è un veicolo molto soddisfacente in termini di prestazioni e affidabilità.
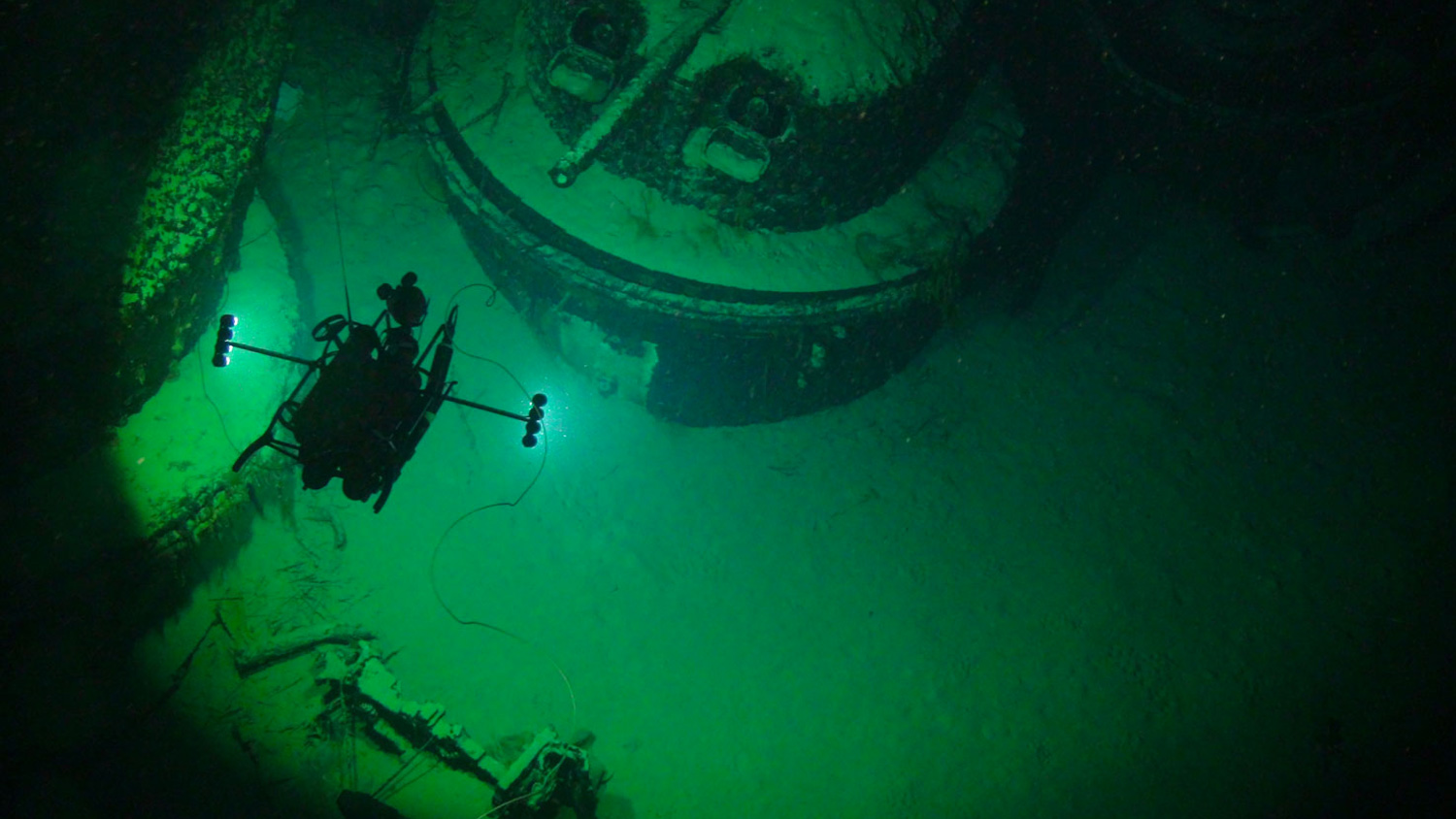
Aver localizzato il relitto della corazzata Roma e aver ispezionato e identificato a fondo tutti i detriti sparsi sul fondo di un canyon roccioso profondo 1300 m è stato un successo gratificante e significativo. La Marina Militare Italiana e altri cacciatori di relitti avevano cercato senza successo per decenni questo importante relitto della Seconda Guerra Mondiale.
Molte altre realizzazioni come il ritrovamento e la documentazione di 24 relitti romani antichi e 15 relitti moderni a profondità comprese tra 300m e 1300m (tra questi il trasporto truppe inglese SS TRANSYLVANIA silurato nel 1917, il sottomarino inglese HMS SARACEN e la sua vittima, il trasporto truppe Italia CRISPI) così come la partecipazione a rilievi archeologici e al recupero di anfore, hanno ulteriormente dimostrato le eccellenti capacità di questo concetto di veicolo che si basa su un limitato appoggio in superficie, non richiedendo installazioni fisse né ampi spazi di coperta, né fonte di alimentazione.
Tuttavia, ispezionando il relitto di ROMA e i cumuli di anfore, avremmo apprezzato una fonte di luce distante dalla telecamera per evitare l'effetto di retrodiffusione del plancton, oltre a consentire la visione di aree più ampie.
Per trasmettere le riprese abbiamo inoltre notato che sarebbe stato utile mostrare il PLUTO PALLA vicino al bersaglio, visto da un'altra telecamera.
Ciò che ha fatto nascere l'idea di avere due veicoli in campo contemporaneamente.
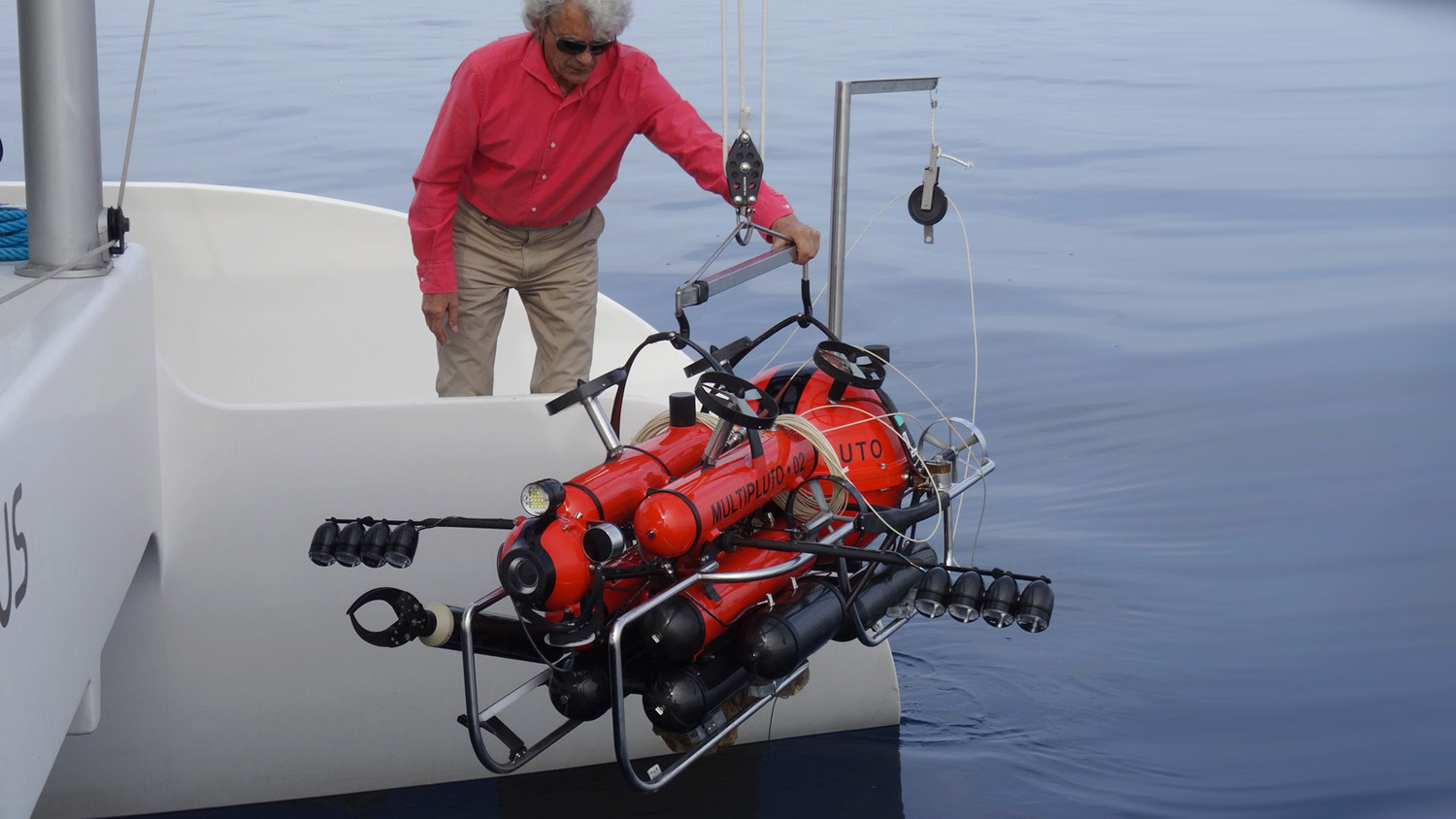
PLUTO GABBIA è un MULTIPLUTO con un telaio di aggancio aggiuntivo per contenere un PLUTO PALLA (o un altro MULTIPLUTO) e con una bobina aggiuntiva di cavo in modo che la comunicazione provenga dalla superficie, lungo un unico cavo a fibra ottica standard da 3,5 mm, fino al PLUTO GABBIA e quindi la PLUTO PALLA tramite il cavo “tether”.
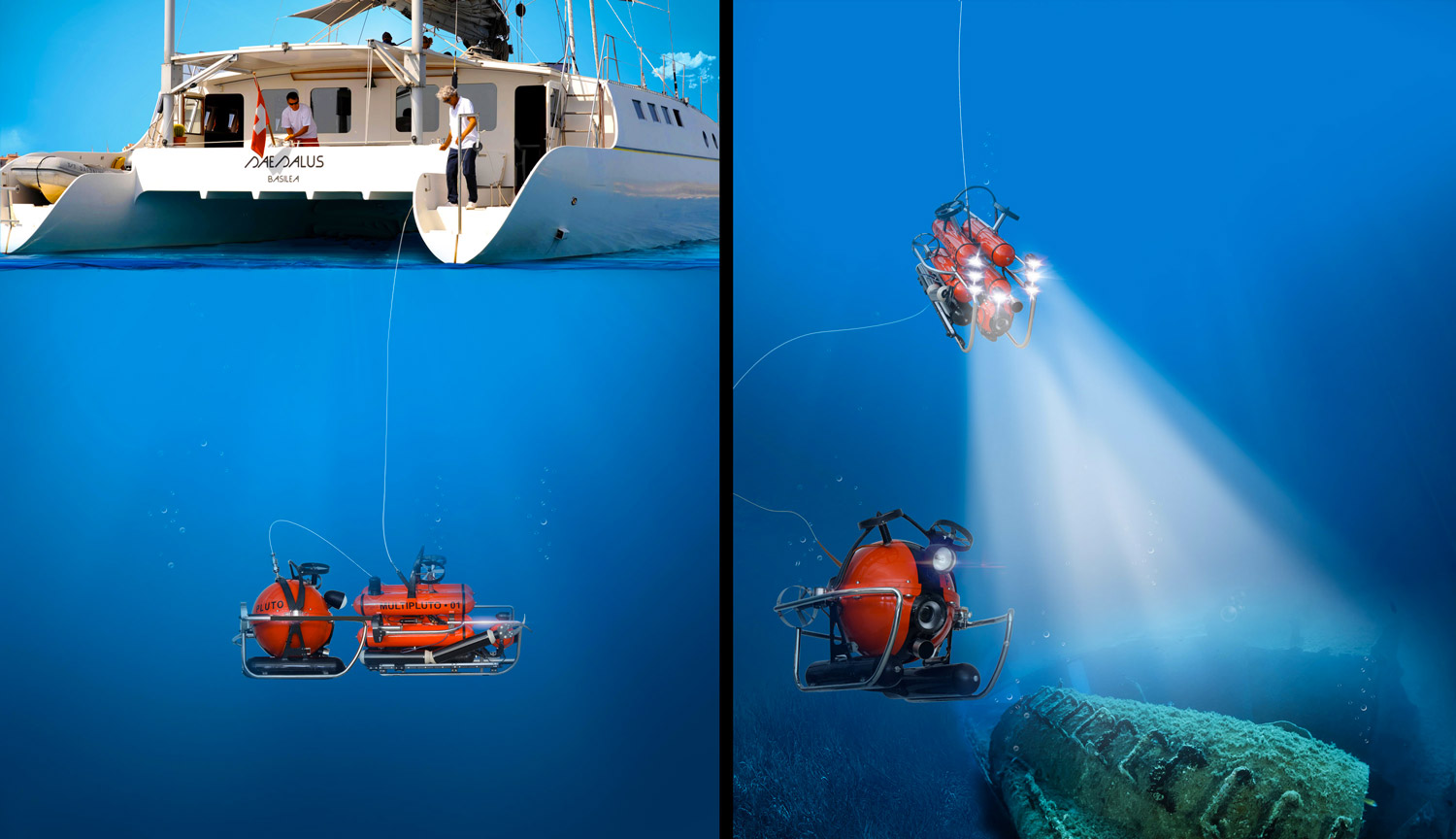
CONCETTO DI BUDDY VEHICLE Oggi molti veicoli per operazioni in profondità sono dotati di un TMS (Tether Management System) che a volte assume la forma di una “gabbia” pesantemente zavorrata e in grado di mantenere il cavo teso verticalmente sotto la nave.
PLUTO GABBIA prende un po’ di quel concetto ma lo estende oltre l'immaginazione.
PLUTO GABBIA non è solo un TMS e una docking station per PLUTO PALLA, ma offre anche funzionalità ROV complete. Ciò significa non solo che entrambi i veicoli sono saldamente collegati tra loro e dispiegati dalla nave per mezzo di un unico cavo come avviene quando si lancia un solo ROV ma anche che, una volta sul fondo, il PLUTO PALLA può sganciarsi dal PLUTO GABBIA rimanendone connesso tramite il cavo “tether”.
A bordo della nave ci sono due console di controllo, una per veicolo, presidiate da due piloti. Un solo verricello automatico gestisce l'unico cavo ombelicale che collega la nave al GABBIA, estendendosi poi a PALLA per il completo controllo indipendente di entrambi i veicoli.
Questa nuova attrezzatura subacquea consente un'incredibile flessibilità operativa.
Solo per citare:
- un veicolo può guardare il retro dell'altro per rilevare eventuali intrecci di cavi
- ogni veicolo può aiutare a disincagliare i cavi dell'altro
- ogni veicolo può fotografare e registrare video dell'altro
- Il PlutoGabbia può rimanere ad una quota superiore e illuminare la scena con le sue potenti luci
- Il PlutoGabbia può restare su un punto di riferimento e il PultoPalla può effettuare misurazioni accurate della distanza e dell'orientamento del sonar di altri punti di interesse
- manipolazioni a due mani
- fotogrammetria accurata o scansioni 3D
- e così via ...