Pluto Gabbia
Pluto Gabbia


Six seasons of extensive tests and nearly one thousand hours of intense deep underwater operations have proved PLUTO PALLA to be a very satisfactory vehicle in performance and reliability.
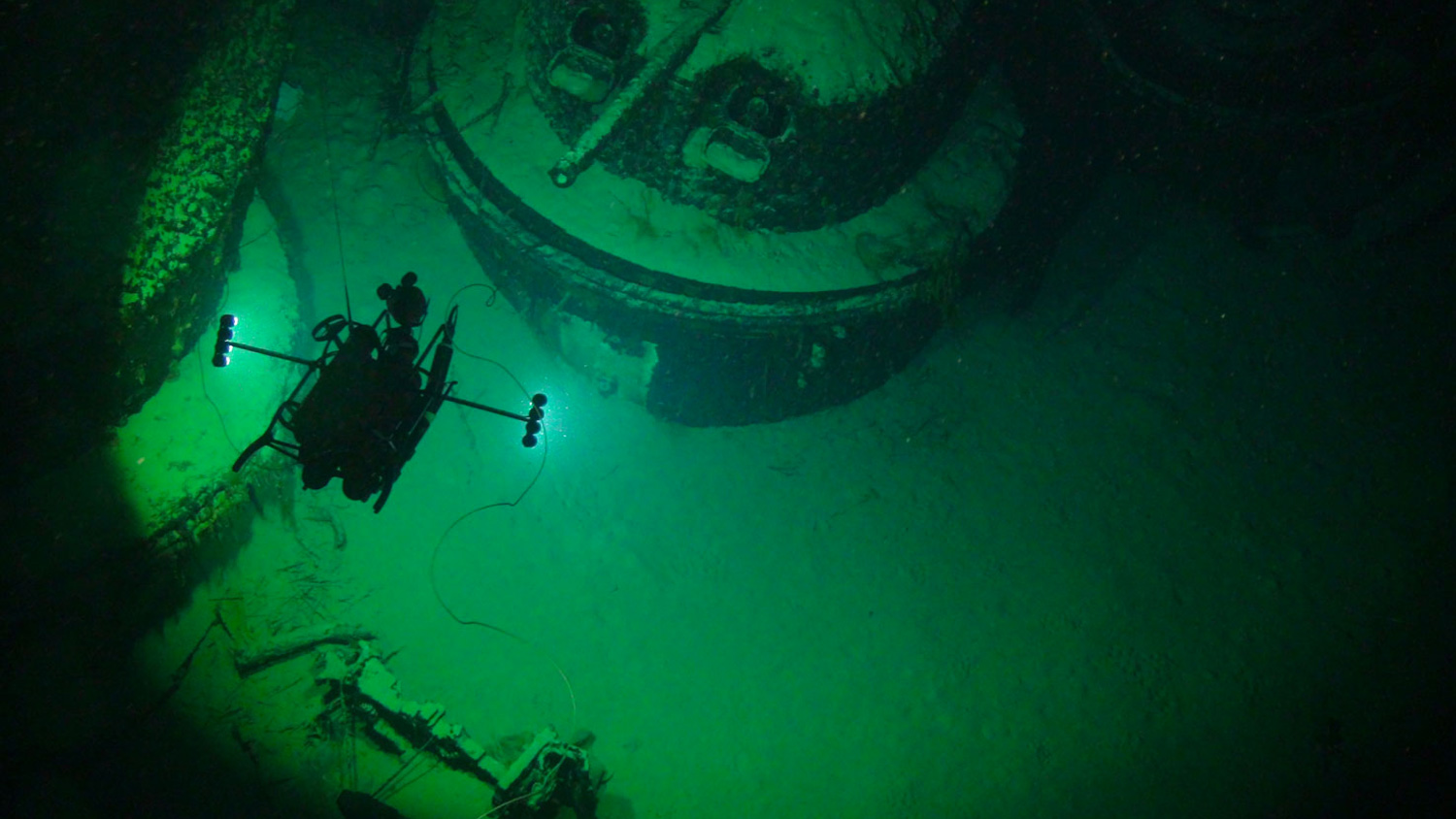
Having located the wreck of the Italian battleship ROMA and having thoroughly inspected and identified all the scattered debris at the bottom of a rocky canyon 1300m deep was a significant rewarding success. The Italian Navy and other wreck hunters have been unsuccessfully searching for this important WWII wreck for decades.
Many other achievements like the finding and documenting of 24 ancient roman wrecks and 15 modern wrecks at depths between 300m and 1300m (Among them the SS TRANSYLVANIA English troop transport torpedoed in 1917, the English submarine HMS SARACEN and her victim the Italia troop transport CRISPI) as well as the participation in archaeological surveying and amphorae recovery, have further proven the excellent capabilities of this vehicle concept which is based on a limited support on surface, not requiring fixed installation neither wide deck space, nor power source.
However while inspecting the ROMA wreck and amphorae fields, Guido Gay, the designer, would have appreciated a light source distant from the camera in order to avoid the backscattering effect of plankton, as well as allowing the view of broader areas.
For broadcasting footage Guido also desired some riverse shots showing the PLUTO PALLA close to the target, as viewed from another camera.
That is what sparked the idea of having two vehicles on scene at the same time.
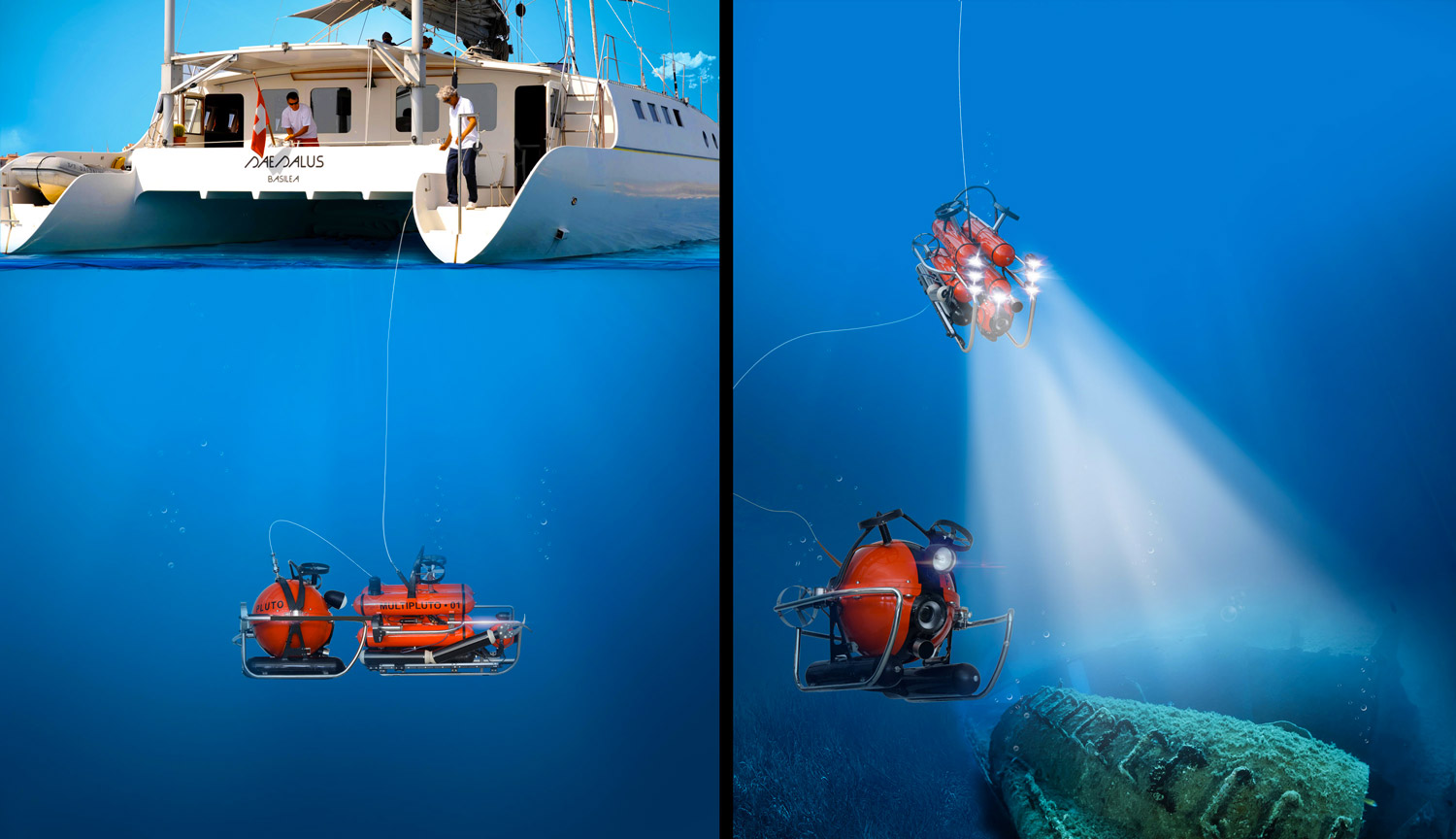
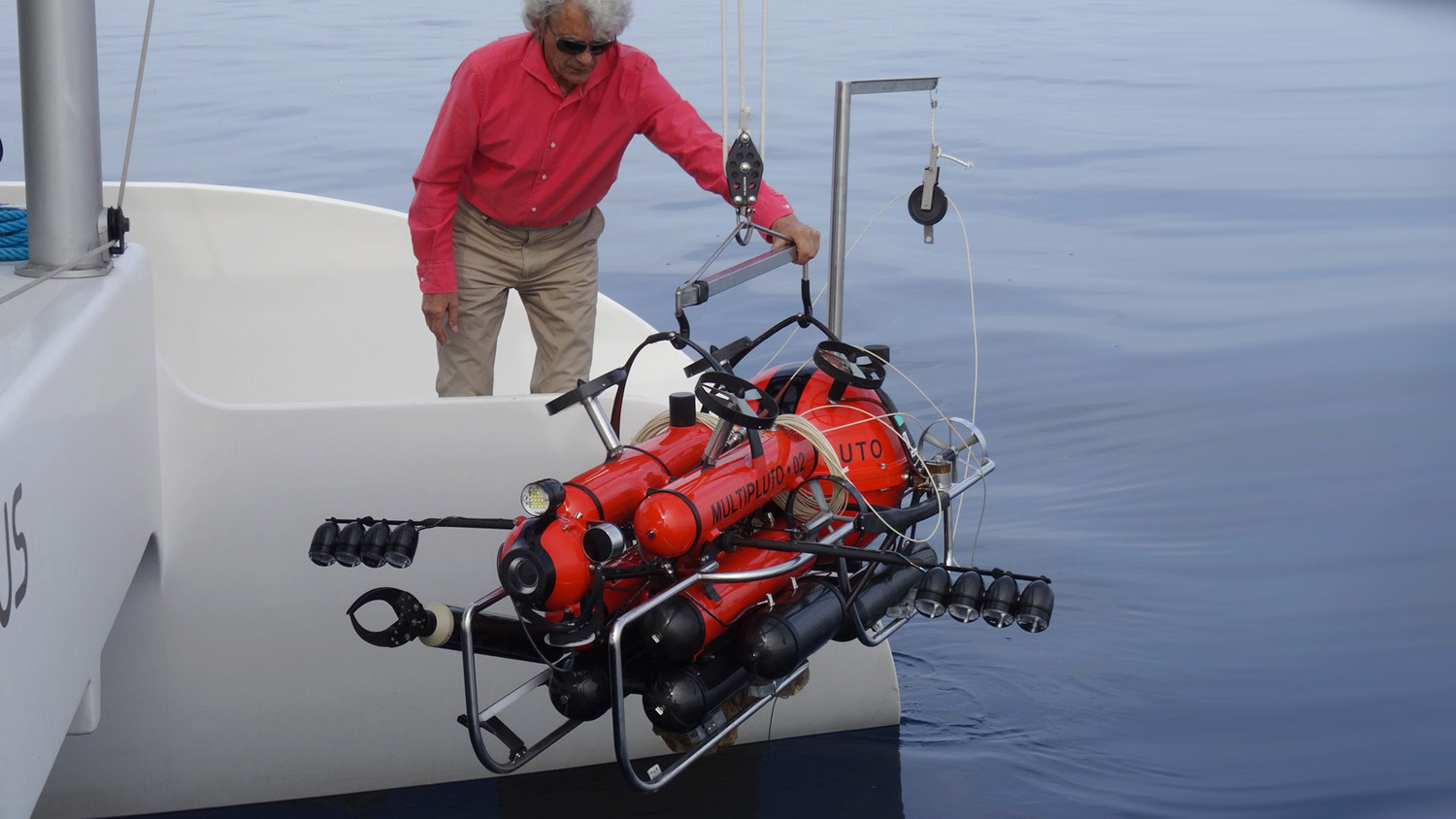
PLUTO GABBIA is a MULTIPLUTO with an added docking frame to hold PLUTO PALLA (or another MULTIPLUTO) and with an added reel of tether cable so that the communication comes from the surface along our standard 3.5mm single fiber optic cable to PLUTO GABBIA then part of the communications is diverted to PLUTO PALLA via the tether cable.
BUDDY VEHICLE CONCEPT
Today many vehicles for deep operation are equipped with a TMS Tether Management System that sometimes takes the shape of a cage (gabbia) heavily ballasted capable of keeping the cable tight vertically down under the ship.
PLUTO GABBIA takes a little bit of that concept but extending it beyond imagination.
PLUTO GABBIA is not only a TMS and a docking station for PLUTO PALLA, but it also features full ROV capabilities. Meaning that both vehicles are firmly connected to each other to form a single body that is deployed from the ship by means of a single cable as is the case when launching one ROV only, but, once at the bottom PLUTO PALLA swims away linked to PLUTO GABBIA via the tether cable.
On board the ship there are two control consoles, one per vehicle, manned by two pilots. Only one automatic winch is managing the single umbilical cable connecting the ship to GABBIA, then extending to PALLA for the complete independent control of both vehicles.
This new diving gear allows for unbelievable operational flexibility.
Just to mention:
- one vehicle can watch the back of the other one for cable entanglement
- each vehicle can assist in disengaging cable entanglements of the other
- photographing and video recording of each other
- GABBIA standing high and illuminating the scene with its powerful lights
- GABBIA can stay over a reference point and PALLA can make accurate sonar distance and bearings measurements of other points of interest
- two hand manipulations
- accurate photogrammetry or 3D scans
- …and so on…